


Часть 2. Роботизация производства в СССР до 1991 года как пример технического прорыва при плановой экономике
В XX веке СССР фактически был одним из мировых лидеров в робототехнике. Вопреки всем утверждениям буржуазных пропагандистов и политиков, Советский Союз за несколько десятилетий смог из страны с народом, не знавшим грамоту, превратиться в передовую космическую державу.
Рассмотрим некоторые – но отнюдь не все – примеры становления и развития робототехнических решений.
В 30-е годы один их советских школьников Вадим Мацкевич создал робота, который мог двигать правой рукой. Создание робота длилось 2 года, всё это время мальчик проводил в токарных мастерских Новочеркасского политехнического института. В 12 лет Вадим уже отличался изобретательностью. Он создал радиоуправляемый маленький броневик, который запускал фейерверки.
Также в эти годы появились автоматические линии для обработки деталей подшипников, а затем, в конце 40-х годов, впервые в мире было создано комплексное производство поршней для тракторных двигателей. Автоматизировались все процессы: от загрузки сырья до упаковки продукции.
В конце 40-х советский ученый Сергей Лебедев закончил разработку первой в Советском Союзе электронной вычислительной цифровой машины МЭСМ, которая появилась в 1950 году. Эта ЭВМ стала самой быстродействующей в Европе. Через год Советский Союз выпустил приказ о разработке автоматических систем управления военной техникой и создании кафедры “Специальной робототехники и мехатроники”.
В 1958 году советскими учеными была разработана первая в мире полупроводниковая АВМ (аналоговая вычислительная машина) МН-10, которая покорила гостей выставки в Нью-Йорке. Тогда же учёный-кибернетик Виктор Глушков высказал идею о “мозгоподобных” структурах ЭВМ, которые соединят миллиарды процессоров и будут способствовать слиянию памяти данных.
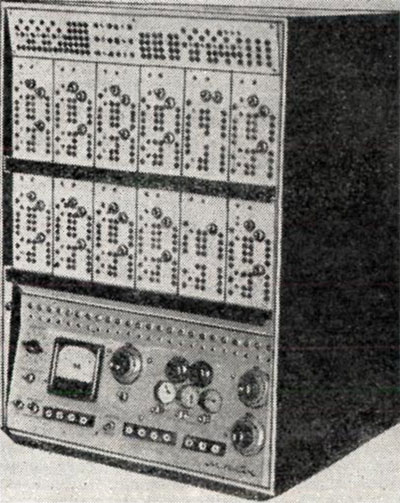
Аналоговая вычислительная машина МН-10
В конце 50-х годов советским ученым впервые удалось сфотографировать обратную сторону Луны. Это сделали с помощью автоматической станции “Луна-3”. А 24 сентября 1970 года советский космический аппарат “Луна-16” доставил на Землю образцы грунта с Луны. Затем это повторили с помощью аппарата “Луна-20” в 1972 году.
Одним из самых заметных достижений отечественной робототехники и науки стало создание в КБ им. Лавочкина аппарата «Луноход-1». Это очувствленный робот второго поколения. Он снабжен сенсорными системами, среди которых главной является система технического зрения (СТЗ). “Луноход-1” и “Луноход-2”, разработанные в 1970-1973 годах, управляемые человеком-оператором в супервизорном режиме, получили и передали ценную информацию о лунной поверхности на Землю. А в 1975 году в СССР были запущены автоматические межпланетные станции «Венера-9» и «Венера-10». С помощью ретрансляторов они передали информацию о поверхности Венеры, совершив на ней посадку.
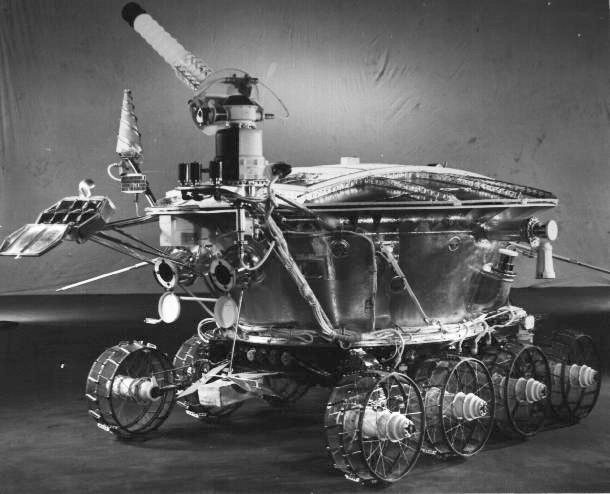
Первый в мире планетоход “Луноход-1”
В 1962 году в Политехническом музее появился робот-гуманоид «РЭКС», который проводил экскурсии для детей.
С конца 60-х годов в Советском Союзе началось массовое внедрение первых отечественных роботов в промышленность, разработка научно-технических основ и организаций, связанных с робототехникой. Стало стремительно развиваться освоение роботами подводных пространств, были усовершенствованы военные и космические разработки.
Особым достижением в те годы стала разработка дальнего беспилотного разведчика ДБР-1, который мог выполнять задачи на всей территории Западной и Центральной Европы. Также этот беспилотник получил обозначение И123К, его серийное производство наладили с 1964 года.

ДБР – 1
В 1966 году воронежскими учеными был изобретен манипулятор для укладки металлических листов.
Как было сказано выше, освоение подводного мира шло в ногу с остальными техническими прорывами. Так, в 1968 году Институтом океанологии АН СССР совместно с Ленинградским политехническим институтом и другими вузами был создан один из первых роботов для освоения подводного мира – телеуправляемый от ЭВМ аппарат “Манта” (типа “Осьминог”). Его система управления и сенсорный аппарат позволяли захватывать и подбирать объект, на который указывал оператор, подносить его к “телеглазу” или укладывать в бункер для изучения, а также производить поиск объектов в мутной воде.
В 1969 году в ЦНИТИ Миноборонпрома под руководством Б.Н. Сурнина приступили к созданию промышленного робота “Универсал -50”. А в 1971 году появились первые опытные образцы промышленных роботов первого поколения – роботы УМ-1 (созданные под руководством П.Н. Белянина и Б.Ш. Розина) и УПК-1 (под руководством В.И. Аксенова), оснащённые системами программного управления и предназначенные для выполнения операций механообработки, холодной штамповки, выполнения гальванопокрытий.
Автоматизация в те годы дошла даже до того, что в одном из ателье внедрили робота-закройщика. Его запрограммировали на выкройку, измерение размеров фигуры заказчика вплоть до раскроя ткани.
В начале 70-х годов многие заводы перешли на автоматизированные линии. Например, Петродворцовый часовой завод «Ракета» отказался от ручной сборки механических часов и перешёл на роботизированные линии, осуществляющие эти операции. Таким образом, освободили более 300 трудящихся от утомительной работы и увеличили производительность труда в 6 раз. Качество изделий улучшилось, а количество брака сильно снизилось. За передовое и рациональное производство завод наградили орденом Трудового Красного Знамени в 1971 году.
Петродворцовый часовой завод «Ракета»
В 1973 году в ОКБ ТК при Ленинградском политехническом институте были собраны и введены на производство первые в СССР подвижные промышленные роботы МП-1 и “Спрут”, а годом позднее даже провели первый чемпионат мира по шахматам среди компьютеров, где победителем стала советская программа “Каисса”.
В том же 1974 году Совет Министров СССР в постановлении правительства от 22 июля 1974 года “О мерах по организации производства автоматических манипуляторов с программным управлением для машиностроения” указал: назначить ОКБ ТК главной организацией по разработке промышленных роботов для машиностроения. В соответствии с постановлением Госкомитета СССР по науке и технике были созданы первые 30 серийных промышленных роботов для обслуживания различных производств: для сварки, для обслуживания прессов и станков и т.д. В Ленинграде началась разработка системы магнитной навигации «Кедр», «Инвариант» и «Скат» для космических кораблей, подводных лодок и самолётов.
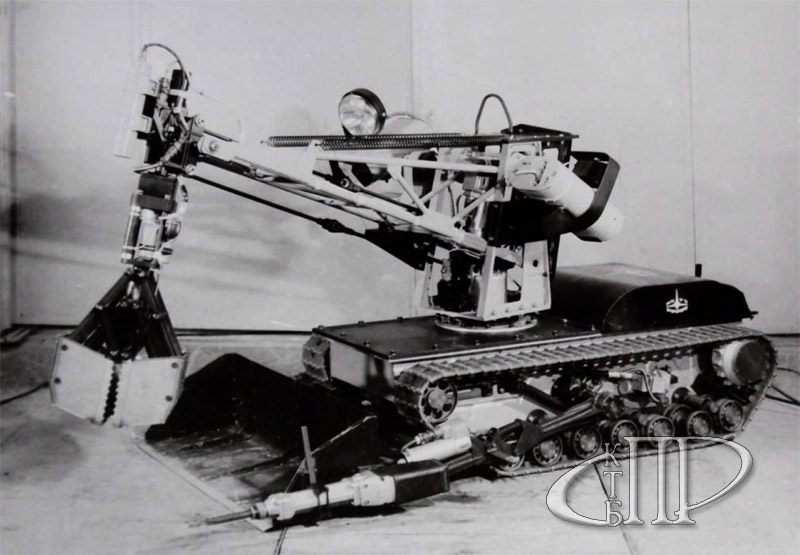
Не стояло на месте и внедрение различных вычислительных комплексов. Так, в 1977 году В. Бурцев создал первый симметричный многопроцессорный вычислительный комплекс (МВК) «Эльбрус-1». Для межпланетных изысканий советские ученые создали интегрального робота “Кентавр”, управляемого комплексом М-6000. Навигация этого вычислительного комплекса состояла из гироскопа и системы счисления пути с одометром, также он был оснащён лазерным сканирующим измерителем расстояний и тактильным датчиком, позволявшим получать информацию об окружении.
К лучшим образцам, созданным к концу 70-х, можно отнести промышленные роботы типа “Универсал”, ПР-5, “Бриг-10», МП-9С, ТУР-10 и ряд других моделей.
В 1978 году в СССР был выпущен каталог “Промышленные роботы” (М.: Мин-Станкопром СССР; Минвуз РСФСР; НИИмаш; ОКБ технической кибернетики при Ленинградском Политехническом Институте, 109 с.), в котором были представлены технические характеристики 52 моделей промышленных роботов и двух манипуляторов с ручным управлением.
С 1969 по 1979 годы количество комплексно механизированных и автоматизированных цехов и производств выросло с 22,4 до 83,5 тысяч, а механизированных предприятий – с 1,9 до 6,1 тысяч.
В 1979 году в СССР начали выпускать высокопроизводительные многопроцессорные УВК с перенастраиваемой структурой ПС 2000, позволяющей решать множество математических и других задач. Была разработана технология распараллеливания задач, которая позволила развиться идее системы искусственного интеллекта. В Институте Кибернетики под руководством Н. Амосова был создан легендарный робот “Малыш”, который управлялся обучающейся нейронной сетью. Такая система, с помощью которой был проведён ряд значимых исследований в области нейронных сетей, выявила преимущества в управлении последних перед традиционными алгоритмическими. В то же время в Советском Союзе была разработана революционная модель ЭВМ 2-го поколения – БЭСМ-6, в которой впервые появился прообраз современной кэш-памяти.
О развитии вычислительной техники и кибернетики в СССР вы узнаете позже в отдельном материале от нашего издания.

БЭСМ-6
Также в 1979 году в МГТУ им. Н. Э. Баумана по заказу КГБ был разработан аппарат для обезвреживания взрывоопасных предметов — сверхлёгкий мобильный робот МРК-01 (характеристики робота можно посмотреть на http://www.bnti.ru/des.asp?itm=2415&tbl=02.01.02.02.).
К 1980-му году в серийное производство поступило около 40 новых моделей промышленных роботов. Также в соответствии с программой Госстандарта СССР началась работа по стандартизации и унификации этих роботов, а в 1980 году появился первый пневматический промышленный робот с позиционным управлением, оснащённый техническим зрением МП-8. Его разработало ОКБ ТК Ленинградского политехнического института, где был создан Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики (ЦНИИ РТК). Также учёные озаботились вопросами создания очувствленных роботов.
В общем, в 1980 году в СССР количество промышленных роботов превысило 6000 штук, что составляло более 20% от общего числа в мире.
В октябре 1982 года СССР стал организатором международной выставки “Промышленные роботы-82”. В этом же году был издан каталог “Промышленные роботы и манипуляторы с ручным управлением” (М.: НИИмаш Минстанкопром СССР, 100 с.), в котором были приведены данные о промышленных роботах, выпускаемых не только в СССР (67 моделей), но и в Болгарии, Венгрии, ГДР, Польше, Румынии и Чехословакии.
В 1983 году СССР принял на вооружение уникальный, разработанный специально для ВМФ, комплекс П-700 “Гранит”, разработанный НПО машиностроения (ОКБ-52), в котором ракеты могли самостоятельно выстраиваться в боевой порядок и распределять цели во время полёта между собой.
В 1984 году были разработаны системы для спасения информации с терпящих крушение летательных аппаратов и обозначения мест аварий «Клён», «Маркер» и «Призыв».
В Институте Кибернетики по заказу Министерства обороны СССР в эти годы был создан автономный робот “МАВР”, который мог свободно направляться к цели через пересеченную сложную местность. «МАВР» обладал высокой проходимостью и надежной системой защиты. Также в эти годы был спроектирован и внедрен первый пожарный робот.
В мае 1984 года вышло постановление правительства “Об ускорении работ по автоматизации машиностроительного производства на основе передовых технологических процессов и гибких переналаживаемых комплексов”, которое дало новый рывок в роботизации в СССР. Обязанности по осуществлению политики в области создания, введения и обслуживания гибких автоматизированных производств были возложены на Минстанкопром СССР. В основном работы производились на предприятиях машиностроения и металлообработки.
В 1984 году уже насчитывалось больше 75 автоматизированных цехов и участков, оснащенных роботами, набирал силы процесс комплексного внедрения промышленных роботов в составе технологических линий и гибких автоматизированных производств, которые использовались в машиностроении, приборостроении, радио- и электронной промышленности.
На многих предприятиях Советского Союза были введены в эксплуатацию гибкие производственные модули (ГПМ), гибкие автоматизированные линии (ГАЛ), участки (ГАУ) и цехи (ГАЦ) с автоматизированными транспортно-складскими системами (АТСС). К началу 1986 года количество таких систем насчитывалось более 80, они включали в себя автоконтроль, смену инструмента и удаление стружки, благодаря чему время производственного цикла сократилось в 30 раз, экономия производственной площади увеличилась на 30-40%.
Гибкие производственные модули
В 1985 году ЦНИИ РТК начал разработку системы бортовых роботов для МКС “Буран”, оснащенной двумя манипуляторами длиной 15 м, системой освещения, телевидения и телеметрии. Основными задачами системы было выполнение операций с многотонными грузами: выгрузка, стыковка с орбитальной станцией. А в 1988 году произвели запуск МКС “Энергия-Буран”. Авторами проекта были В. П. Глушко и другие советские ученые. МКС “Энергия-Буран” стала самым значительным и передовым проектом 80-х годов в СССР.
МКС “Энергия-Буран”
В 1981-1985 гг. в СССР был некоторый спад производства роботов из-за мирового кризиса в отношениях между странами, но к началу 1986 г. только на предприятиях Минприбора СССР функционировало уже более 20 000 промышленных роботов.
К концу 1985 года в СССР количество промышленных роботов приблизилось к отметке в 40 000 штук, что составило около 40% всех роботов в мире. Для сравнения: в США это количество было в несколько раз меньше. Роботы были повсеместно внедрены в народное хозяйство и промышленность.
После трагических событий на Чернобыльской АЭС в МВТУ им. Баумана советские инженеры В. Шведов, В. Доротов, М. Чумаков, А. Калинин быстро и успешно разработали мобильных роботов, которые помогли провести необходимые исследования и работы после катастрофы в опасных зонах – МРК и «Мобот-ЧХВ». Известно, что тогда были использованы робототехнические устройства как в виде радиоуправляемых бульдозеров, так и специальных роботов для обеззараживания прилегающей местности, крыши и здания аварийного блока АЭС.
Мобот-ЧХВ (мобильный робот, чернобыльский, для химических войск)
К 1985 году в СССР были разработаны Госстандарты на промышленные роботы и манипуляторы: были выпущены такие нормы, как ГОСТ 12.2.072-82 “Роботы промышленные. Роботизированные технологические комплексы и участки. Общие требования безопасности”, ГОСТ 25686-85 “Манипуляторы, автооператоры и промышленные роботы. Термины и определения” и ГОСТ 26053-84 “Роботы промышленные. Правила приемки. Методы испытаний”.
К концу 80-х большую актуальность приобрела задача роботизации народного хозяйства: горнодобывающей, металлургической, химической, легкой и пищевой промышленности, сельского хозяйства, транспорта и строительства. Широко развивалась технология приборостроения, которая перешла на микроэлектронную базу.
В поздние советские годы робот мог заменить на производстве от одного до трёх человек в зависимости от смены, повышал производительность труда примерно на 20-40 % и заменял в основном низкоквалифицированных работников. Перед советскими учеными и разработчиками стояла непростая задача понизить стоимость робота, так как это сильно сдерживало повсеместную роботизацию.
В СССР проблемами разработки теоретических основ робототехники, развития научно-технических идей, создания и исследования роботов и робототехнических систем занимались в те годы ряд научных и производственных коллективов: МГТУ им. Н.Э. Баумана, Институт машиноведения им. А.А. Благонравова, Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики (ЦНИИ РТК) Санкт-Петербургского политехнического института, Институт электросварки им. Е.О. Патона (Украина), Институт прикладной математики, Институт проблем управления, НИИ технологии машиностроения (г. Ростов), Экспериментальный научно-исследовательский институт металлорежущих станков, Проектно-технологический институт тяжелого машиностроения, Оргстанкопром и др.
Большой вклад в организацию науки и производства, создание научно-технической базы по проблеме роботов и разработку теоретических основ робототехники внесли члены-корреспонденты И.М. Макаров, Д.Е. Охоцимский, а также известные ученые и специалисты М.Б. Игнатьев, Д.А. Поспелов, А.Б. Кобринский, Г.Н. Рапопорт, B.C. Гурфинкель, Н.А. Лакота, Ю.Г. Козырев, В.С. Кулешов, Ф.М. Кулаков, B.C. Ястребов, Е.Г. Нахапетян, А.В. Тимофеев, B.C. Рыбак, М.С. Ворошилов, А.К. Платонов, Г.П. Катыс, А.П. Бессонов, А.М. Покровский, Б.Г. Аветиков, А.И. Корендясев и др.
Молодых специалистов готовили через систему вузовской подготовки, специального среднего и профессионально-технического образования и через систему переподготовки и повышения квалификации рабочих.
Подготовка кадров по основной робототехнической специальности “Робототехнические системы и комплексы” осуществлялась в то время в ряде ведущих вузов страны (МГТУ, СППИ, Киевском, Челябинском, Красноярском политехнических институтах и др.).
На протяжении многих лет развитие робототехники в СССР и странах Восточной Европы велось в рамках сотрудничества стран – членов СЭВ (Совет Экономической Взаимопомощи). В 1982 году главами делегаций было подписано Генеральное соглашение о многостороннем сотрудничестве по разработке и организации производства промышленных роботов, в связи с чем был создан Совет главных конструкторов (СГК). В начале 1983 года членами СЭВ был заключен Договор о многосторонней специализации и кооперировании производства промышленных роботов и манипуляторов различного назначения, а в декабре 1985 года 41-й (внеочередной) сессией СЭВ была принята Комплексная программа научно-технического прогресса стран – членов СЭВ до 2000 года, в которой промышленные роботы и роботизация производства включены как одно из приоритетных направлений по комплексной автоматизации.
При участии СССР, Венгрии, ГДР, Польши, Румынии, Чехословакии и других стран социалистического лагеря, в те годы был успешно создан новый промышленный робот для дуговой электросварки “Интерробот-1”. Со специалистами из Болгарии ученые из СССР даже основали производственное объединение “Красный пролетарий – Берое”, которое было оснащено современными роботами с электромеханическими приводами серии РБ-240. Они были предназначены для вспомогательных операций: загрузки и разгрузки деталей на металлорежущих станках, смены рабочего инструмента, транспортировки и укладки на поддоны деталей и др.
Подводя итог, можно сказать, что к началу 90-х годов в Советском Союзе было выпущено около 100 000 единиц промышленных роботов, которые заменили более миллиона рабочих, но освободившимся сотрудникам всё равно находили работу. В СССР было разработано и выпущено свыше 200 моделей роботов. К концу 1989 года в состав Минприбора СССР входило свыше 600 предприятий и более 150 НИИ и КБ. Общая численность работающих в отрасли превышала миллион человек.
Советские инженеры планировали внедрить использование роботов практически во все сферы промышленности: машиностроение, сельское хозяйство, строительство, металлургию, горнодобывающую, лёгкую и пищевую промышленность, – но этому не суждено было сбыться.
С разрушением СССР плановая работа по развитию робототехники на государственном уровне остановилась, а серийное производство роботов прекратилось. Исчезли даже те роботы, что уже применялись в промышленности: произошла приватизация средств производства, затем заводы были полностью разорены, а уникальное дорогое оборудование уничтожено или продано на металлолом. Наступил капитализм.
Источники
1.http://www.citywalls.ru/house20540.html?s=5iorlnpph9epc8d13j5ksm6p73
2.http://www.icfcst.kiev.ua/MUSEUM/ukrchronology_r.html
3.http://www.computer-museum.ru/histussr/cniirtk.htm
4.http://www.bibliotekar.ru/7-robot/6.htm
5.http://statehistory.ru/4498/Istoriya-sovetskoy-robototekhniki/
6.http://mash-xxl.info/info/208703/